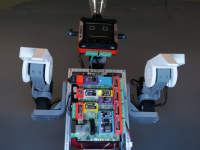
Sistemul contine un modul TPS3 in partea centrala si un modul TPS2L echipat cu un ecran TFT in partea de sus. Aplicatiile sunt scrise in Tibbo Basic si folosesc urmatoarele module functionale Tibbit: RS232 Tibbit – pentru comunicatia intre cele doua TPS2L si TPS3 RS485 Tibbit controleaza zece actuatoare MX-64 Dynamixel care realizeaza miscarea bratelor…
Vezi mai mult ...
Sistem demonstrativ cu diferite module de intrari iesiri: Funny robot.