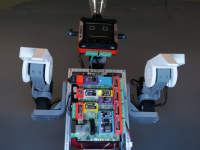
Sistemul contine un modul TPS3 in partea centrala si un modul TPS2L echipat cu un ecran TFT in partea de sus. Aplicatiile sunt scrise in Tibbo Basic si folosesc urmatoarele module functionale Tibbit:
- RS232 Tibbit – pentru comunicatia intre cele doua TPS2L si TPS3
- RS485 Tibbit controleaza zece actuatoare MX-64 Dynamixel care realizeaza miscarea bratelor si a capului robotului
- ADC Tibbit – este conectat la un V-meter
- FPGA Tibbit comanda ledurile RGVB
- High-Voltage solid state relay Tibbit comanda un bec
Pentru realizarea unui astfel de sistem, va rugam sa consultati categoria de produse Automat Programabil BASIC/C.